Jianwei Liu | 刘健为

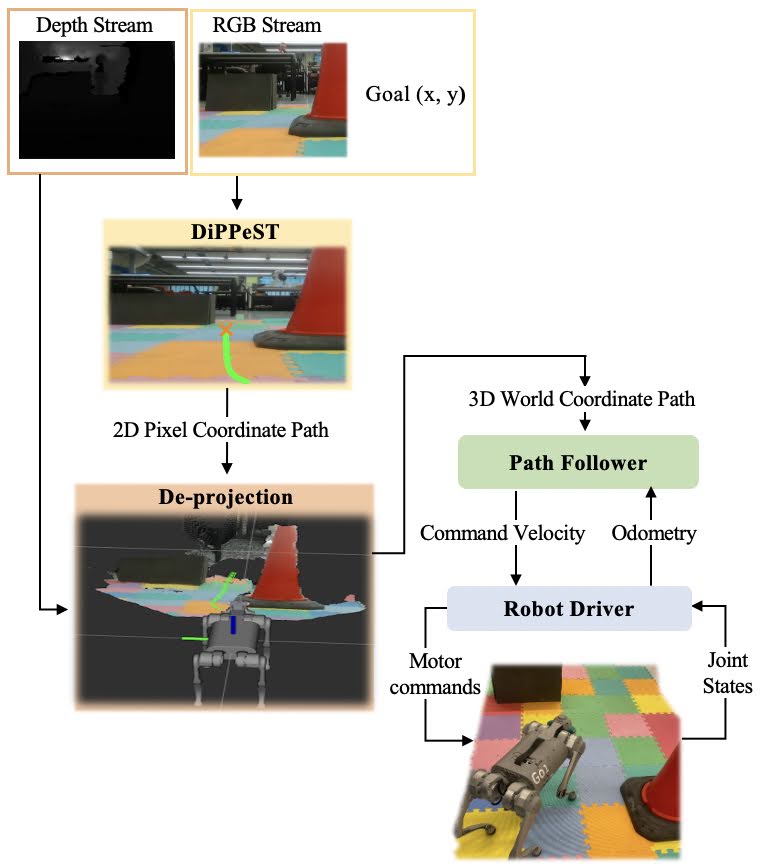
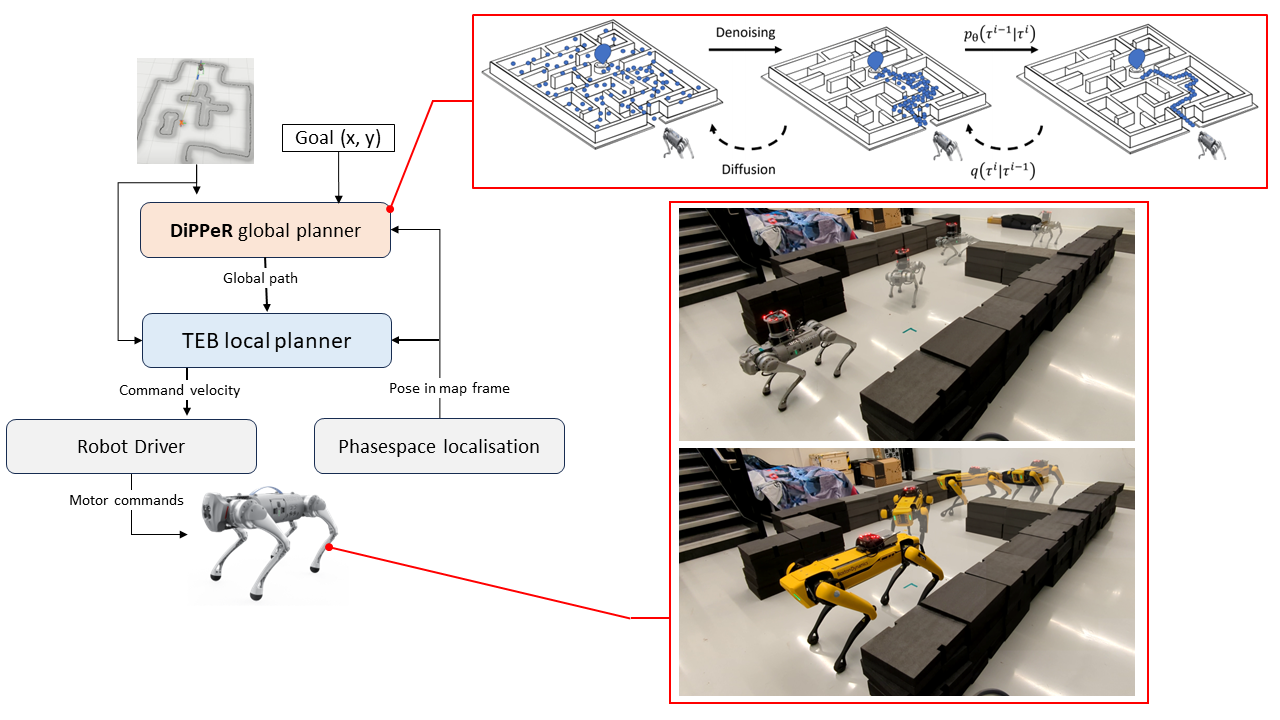
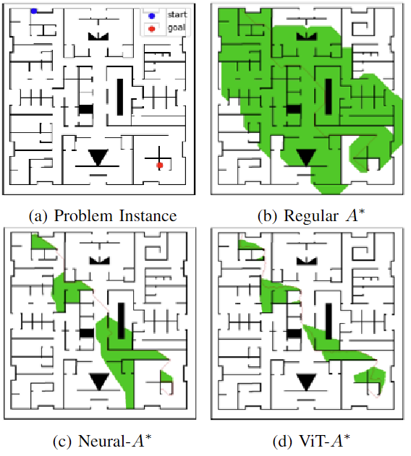
I am an experienced roboticist and currently a PhD student (Sep. 2022 - 2026), working with Prof. Dimitrios Kanoulas at the RPL lab and the Foundational AI CDT at University College London. My current research direction involves utilising Generative ML models (e.g. diffusion models) and Neuromorphic learning for planning for legged robots. I’m also interested in exploring topics such as continual learning and open-endness.
Prior to starting the PhD, I obtained a MEng in Biomedical Engineering from Imperial College London, a MSc in Robotics and Computation from UCL, and worked in industry as a robotics software engineer on off-shore NDT inspection robots and construction robots (see past projects here).
selected publications
- PreprintUnreal Robotics Lab: A High-Fidelity Robotics Simulator with Advanced Physics and RenderingarXiv preprint arXiv:2504.14135, 2025